 返回首页
返回首页

2021中国智能机器人学术年会 | 数图回顾
2021年,全国疫情防控工作趋于常态化管理,在减少人际物理接触的要求下,亟需智能机器人技术和产品替代各类传统人工操作。【2021中国智能机器人学术年会】以“机器人赋能后疫情时代”为主题,通过汇聚领域专家学者和技术人才,深入开展战略研讨和技术展示交流,共同推动中国智能机器人技术发展。

本期数图专辑收录上海交通大学卢策吾教授、复旦大学肖仰华教授、高仙机器人郑宇靖主管等诸多学者报告内容。阅读原文进入数图,查看详细内容。
部分报告展示
报告:机器人辅助远程微创手术关键技术与应用探索

简介:机器人辅助腔镜手术技术可以延伸医生的手术能力,其优势除可提升操作灵活性与稳定性,克服运动杠杆效应,有效缓解疲劳可延长医生职业寿命外,还具备远程操作的潜力。我国拥有沙漠、雪域、从林、海岛等多种复杂环境,且灾害频发,采用机器人辅助远程手术技术可以应对上述环境对医疗资源的需求,且有利于缓解我国医疗资源分布不均的现状。首先介绍远程手术的研究背景及目前现状,进一步介绍基于妙手微创手术机器人的远程手术系统架构,融合图像导航及主从端互相预仿真的远程手术安全机制,低映射频率的轨迹精度保障策略及稳定性保障机制,并介绍远程临床手术实施过程及当前进展。最后总结远程手术机器人的发展趋势。
报告:类别级六维物体位姿估计和追踪
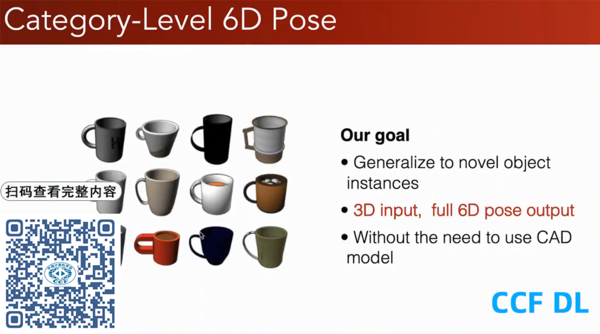
简介:六维物体位姿估计是一个关键的计算机视觉问题,广泛应用于机器人学(如抓取和物体操纵)。经典的六维位姿估计工作侧重于实例级位姿估计,即对少数已知物体估计六维位姿且一般需要物体的CAD模型。尽管实例级位姿估计技术在某些受控环境中已有不少的应用,但这种局限于特定已知物体实例的算法不能泛化到新的物体实例,因此限制了它们在日常物体感知方面的应用。在本次报告中,我将介绍一系列将物体六维位姿估计问题从实例级推广到类别级的工作,包括1)NOCS (CVPR19 oral)估计刚性物体的类别级六维位姿;2)ANCSH (CVPR20 oral)估计多关节物体的类别级六维位姿;3)CAPTRA(ICCV21 oral)追踪刚性和多关节类物体的类别级物体位姿;4)ESSCOP(NeurIPS21)利用SE3等变性进行自监督的类别级物体位姿学习。这些工作对发展有泛化能力的具身视觉提供了思路。
报告:具身智能机器人

简介:具身智能(EmbodiedAI)面向构建一种智能系统,报告浅谈具身智能的历史与未来发展展望。具体介绍讲者具身智能机器人工作: ⑴ SGCI系统:一套面向采用高效(Sample Efficient)、可扩展(Generalizable)、可组合(Compositonal)的机器人学习框架;⑵ GraspNet: 一套通用机器人抓取算法,在大规模通用(未见)物体抓取达到人类水平。
报告:机器能否“认知”世界

简介:随着人工智能技术的飞速发展,在大数据和超大算力的支撑下,机器智能几乎“染指”了人类认知能力的大部分疆域。机器能否“认知”物理世界和人类世界? 机器离人类的认知能力还有多远?机器认知智能实现的关键技术与路径是怎样的? 本报告将介绍认知智能的研究进展与技术落地,并讨论认知智能实现的挑战。
报告:机器人时代的数据闭环

简介:当前机器人技术正处于从自动化(Automated)向自主化(Autonomous)衍变的过程,这意味着更高的认知及学习能力、更强的场景适应能力、以及更完善的多机协作能力。机器人软件的迭代和提高受制于数据流转的速度,高仙从数据的全生命周期出发,设计了一套高度集成,增量复用的演进系统,为团队提供了一个高效的研发闭环。

以上报告收录于CCF数图中,阅读原文进入CCF数图





