 返回首页
返回首页

CCF DL | 软体机器人作为最火的机器人研究方向之一,你了解多少?
导读:随着科技发展,机器人与人工智能领域研究不断深入,新技术接连展现,为促进相关领域学术交流,“机器人与智能”之宾果论坛第一期活动成功举办。 “机器人与智能”之宾果论坛是由中国计算机学会(CCF)主办、北京爱宾果科技有限公司赞助的机器人与人工智能领域的高端学术讲堂。会议报告悉数收录在CCF数字图书馆,本文含有报告视频。
软体机器人是一类新型机器人,具有结构柔软度高,环境适应性好,亲和性强,功能多样等特点,有着十分广阔的研究和应用前景。作为一种新型柔韧机器人,它由软材料加工而成,自身可连续变形,与刚性机器人相比具有更高的柔顺性、安全性和适应性,在人机交互、复杂易碎品抓持和狭小空间作业等方面具有不可比拟的优势。

本期专题,给大家带来英国曼彻斯特大学王昌凌教授题为《3D打印软体机器人的变形研究:感知、仿真及运动规划》的精彩报告。该资源已被数字图书馆收录,扫描下图二维码即可观看。
王教授首先总结了软体机器人的一般性挑战,主要包括快速设计工具、低成本制造方法、新颖的控制算法等。本次报告主要关注其中的感知方法、仿真算法和运动规划方法等三个方面。
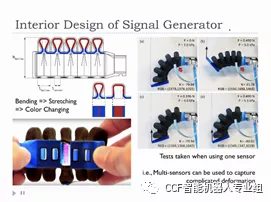

在感知方面,王教授认为可以通过新颖的设计,使用视觉、几何算法替代传统的传感器,并介绍了两项研究工作。第一项工作通过基于颜色的新颖设计,将弯曲程度转化为颜色宽度,有效避免了传统的气压传感方案容易受到外部影响的缺点。第二项工作通过基于可变型膜的新颖设计,将弯曲方向和程度转化为对表面三维形状的估算,这种三维信息在其他传感方案是很难实现的。
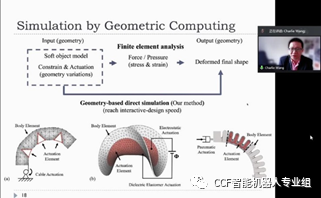
在运动规划方面,需要进一步将仿真工作中的正向运动学模型转化为逆向运动学模型。通过雅克比迭代的方式,可以较好的解决规划对应优化问题,得到稳定连续的规划解。另外,还可以通过引入机器学习,进一步加速和稳定规划过程。

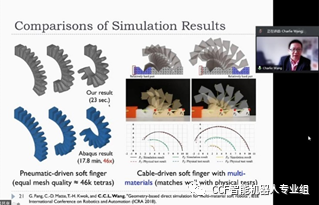
最后,王教授总结了本次报告,并指出在复杂形变、多材料运动特性等方面仍存在很多挑战。
本期报告收录与CCF数字图书馆“机器人与人工智能论坛”专题,此专题资料主要来自以下会议:一、2021年“机器人与智能”之宾果论坛,该论坛是由中国计算机学会(CCF)主办、北京爱宾果科技有限公司赞助的机器人与人工智能领域的高端学术讲堂。二、2020年“机器人智能”论坛,该论坛是由中国计算机学会(CCF)和中国人工智能学会(CAAI)联合主办的机器人与人工智能领域的高端学术讲堂。长按下图二维码,立即进入数图,CCF会员免费观看。





