 返回首页
返回首页
CCF智能机器人专业组|“机器人智能”论坛第七期活动成功举办
“机器人智能”论坛是由中国计算机学会(CCF)和中国人工智能学会(CAAI)联合主办的机器人与人工智能领域的高端学术讲堂。论坛旨在为科研人员、工程师、高校师生以及相关政府决策者提供机器人和人工智能领域的最新成果、学术动态和未来发展的平台,促进跨领域学术交流、学术界与工业界深度合作以及大众创新创业。
2020年11月23日晚19:30,“机器人智能”论坛第七期活动按时开始,并通过在线直播平台分享了精彩报告。
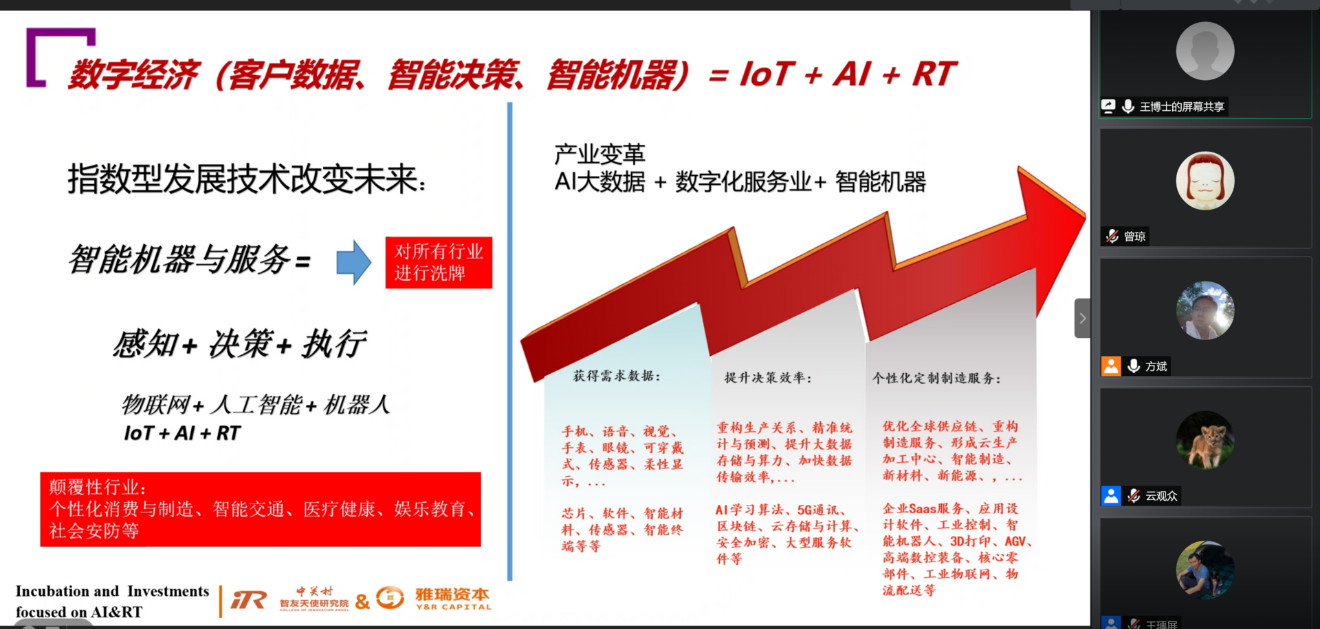
论坛上半场,北京航空航天大学机器人研究所的王田苗教授带来了题为《机器人技术与产业发展的窘境思考》的精彩报告。
王教授首先分享了机器人产业发展相关的数据。从颠覆性技术、战略需求、市场增速等多个方面,都可以看出机器人行业正在蓬勃发展。但随后,王教授指出机器人在学科发展、产业发展现状及未来发展三个方面正面临窘境。
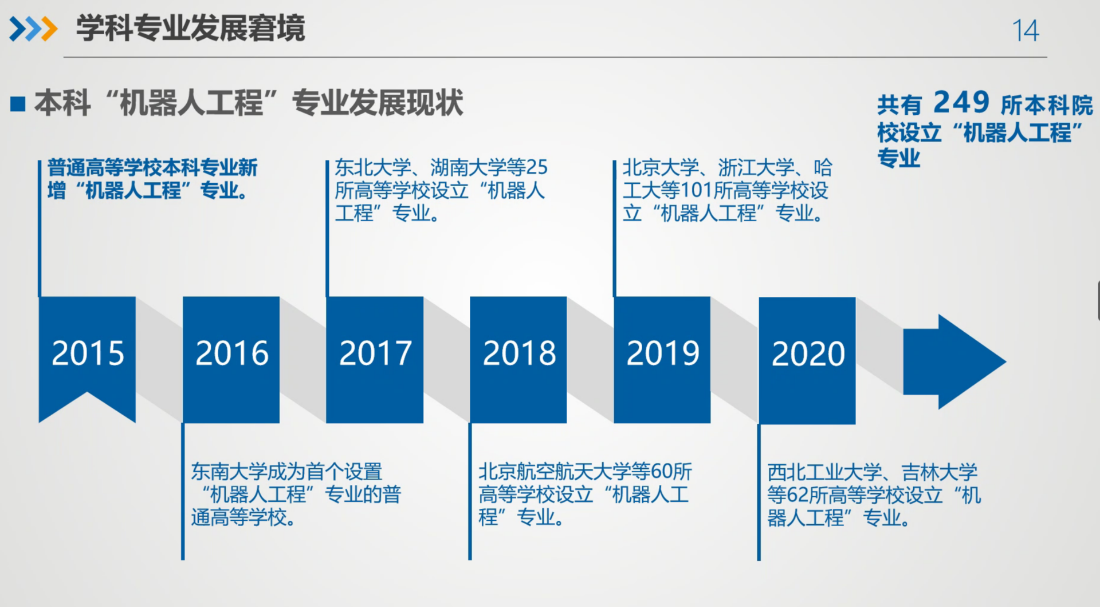
第一,机器人学科发展的窘境。主要体现机器人所涉及的学科非常广,从机械、材料,到人工智能、物联网等,独立设置机器人学科涵盖哪些内容就成为值得探索的问题。基础理论的突破和产业的广泛应用,正在将大大推动机器人学科的发展。近年来已有249所本科院校设立了“机器人工程”的本科专业,但在研究生专业上国内外均尚在过渡阶段。

第二,机器人产业发展现状的窘境。最容易替代的主要是高危险、高繁重、高重复、高精度这样一些行业,而在此其中,高频使用、高端客户、高成长、低价服务的行业更有市场。机器人相对于前后数十年的同类产品里,产品远远落后于数控机床、计算机等产品,特别是市值远远落后于人工智能产品。原因主要有以下几个方面:定义界限不清晰(比如无人机、无人船等产品不一定会划分至机器人领域)、应用定位(未按照结构化环境来定义)、产业规模化(需求不明确,难以大规模爆发;门槛低,容易被覆盖)。


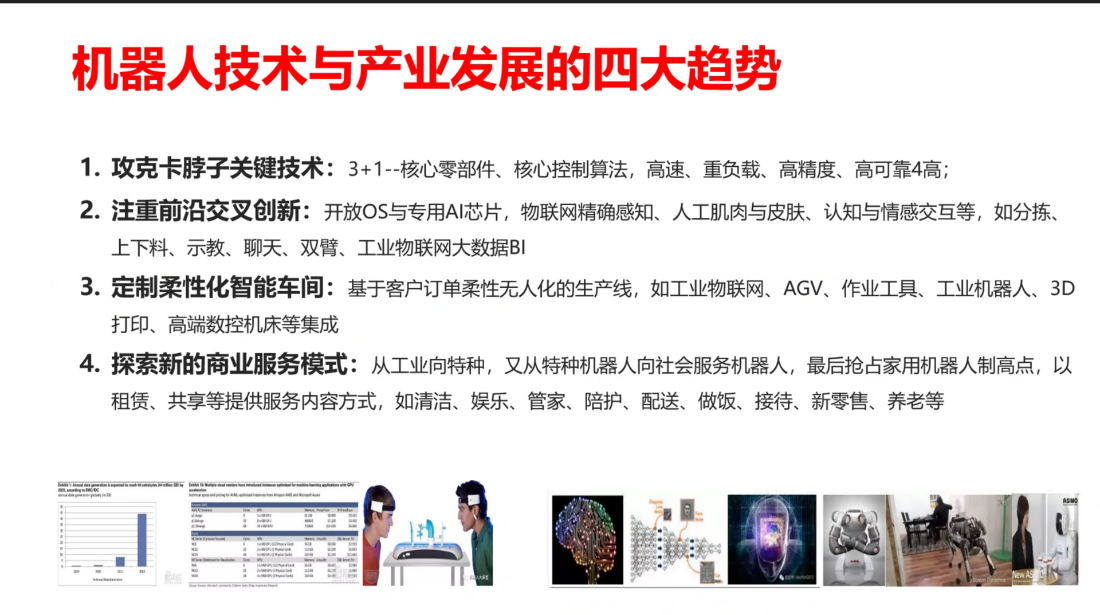
第三,机器人未来发展的窘境。王教授从需求本质问题、未来技术可能性、伦理问题等多个方面总结了机器人未来发展面临的问题。这些问题同时也为未来发展的趋势提供了启示。

论坛下半场,邀请到两位高水平的青年学者分享各自的工作。
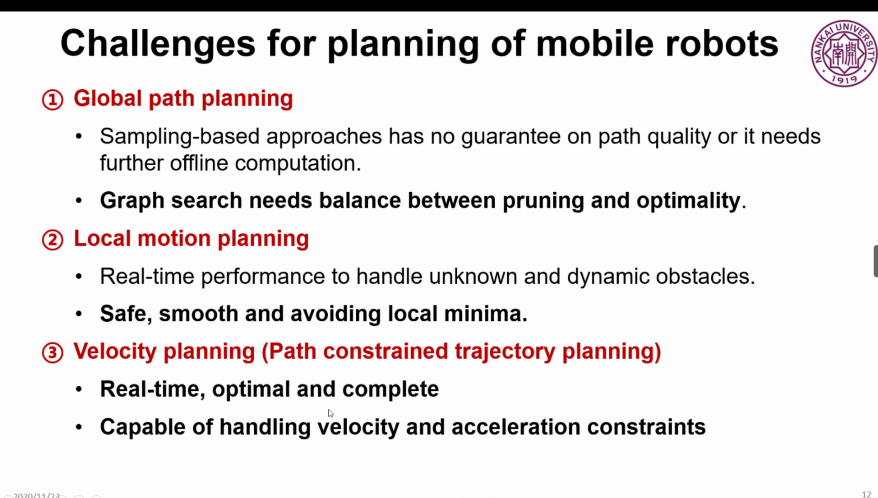
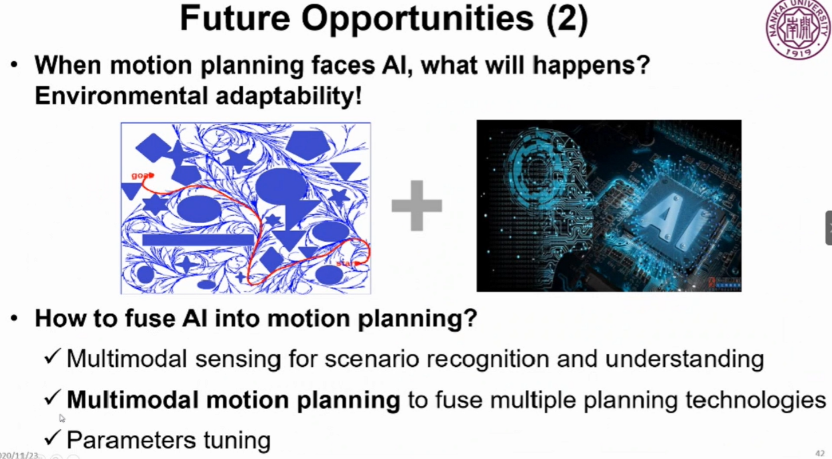
来自南开大学的张雪波教授,带来了题为《移动机器人实时最优运动规划技术》的报告。张老师首先总结了运动规划的背景、挑战、研究成果以及对未来方向的思考。随后重点介绍了其团队在全局规划、局部规划以及速度规划三个层次开展的规划优化工作。其中,全局规划着重考虑时间消耗、内存消耗以及全局最优化,局部规划着重考虑路径的光滑性、实时性、安全性,速度规划中着重考虑时间最优以及稳定性。最后,张老师探讨了运动规划未来的研究方向。

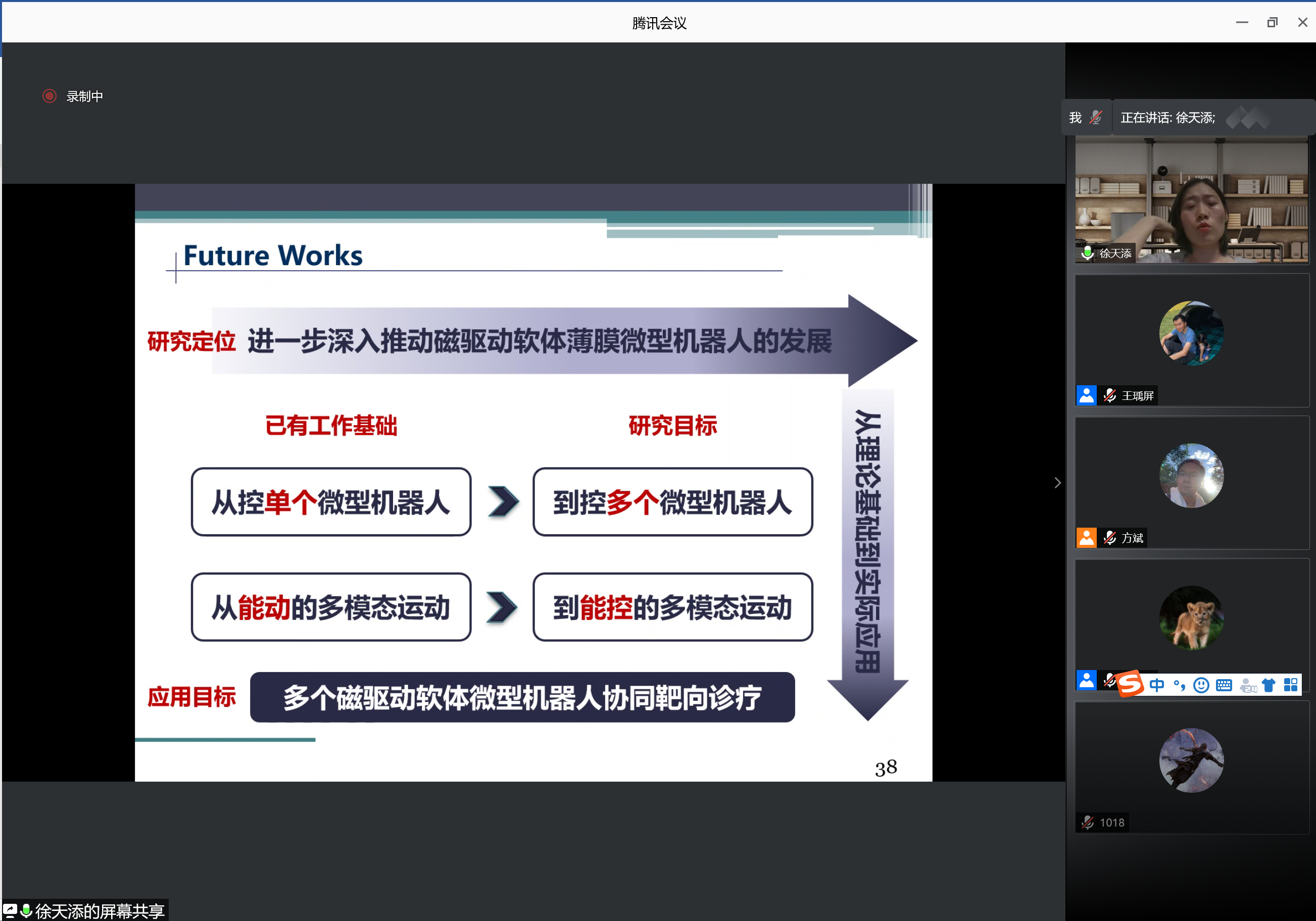
来自中国科学院深圳先进技术研究院的徐天添副研究员,带来了题为《磁驱动软体薄膜微型机器人的多模态运动》的报告。总结了微型机器人的发展进展和趋势,进一步围绕磁驱动软体薄膜微型机器人的视觉伺服三维路径跟踪控制,以及适应复杂环境的多模态运动机制分享了大量研究工作成果。

本次论坛报告的回看视频将会通过CCF和CAAI的电子资源向会员免费开放。
“机器人智能”论坛后续将每月举办一次,欢迎大家持续关注!





