 返回首页
返回首页
“机器人智能”论坛第五期活动成功举办
“机器人智能”论坛是由中国计算机学会(CCF)和中国人工智能学会(CAAI)联合主办的机器人与人工智能领域的高端学术讲堂。论坛旨在为科研人员、工程师、高校师生以及相关政府决策者提供机器人和人工智能领域的最新成果、学术动态和未来发展的平台,促进跨领域学术交流、学术界与工业界深度合作以及大众创新创业。
2020年9月21日晚19:30,“机器人智能”论坛第五期活动按时开始,两个直播平台合计在线观看人数超过26万人。
论坛上半场,欧洲科学院院士、英国布鲁奈尔大学王子栋教授带来了题为《智能数据分析:大数据与坏数据》的精彩报告。
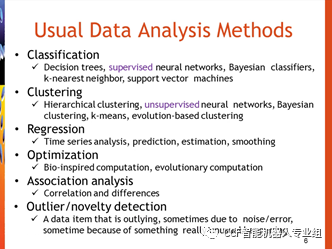
王院士首先回顾了大数据领域在产业界的发展趋势,并对常见的大数据分析方法进行了分类,主要包括:分类、聚类、回归、优化、关联分析、异常值检测等六类。王院士认为,其中的异常值检测方法是较不受关注,但却十分有意义的研究方向。
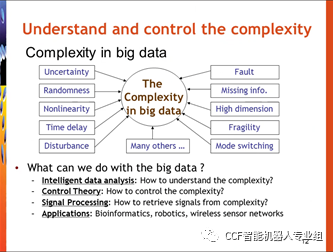
王院士指出,当前大数据分析方法的发展实际上跟不上数据规模的增长,数据分析的可重复性也存在着危机。通过这两个现象,王院士进一步深刻地提出,“大”数据并不一定总是“好”的,评价数据分析方法应该有新的指标,即易变性(Volatility)。

最后,王院士总结了此次报告,认为“大”数据和“坏”数据是数据处理领域的两个相辅相成的因素,将二者结合是一个充满希望的研究方向。

论坛下半场,邀请到两位高水平的青年学者分享各自的工作。
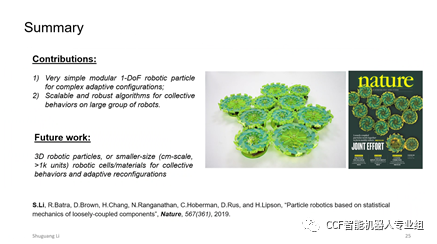
来自哈佛大学的李曙光博士,带来了题为《基于集群力学和分布式控制的“粒子机器人”系统》的报告。详细介绍了其所设计的粒子机器人的力学原理和分布式控制方式,并分享了大量实际实验和仿真试验的结果。这一系列工作被Nature杂志选为封面文章。
本次论坛报告的回看视频将会通过CCF和CAAI的电子资源向会员免费开放。
第一期:
《机器人自主柔性物体操作及其在服装制造业中的可能应用》,潘佳,
《下肢外骨骼机器人步态建模及其控制方法研究》,黄瑞,
https://dl.ccf.org.cn/lecture/lectureDetail?id=4932135003752448&_ack=1
《基于点云和监督学习的6D物体姿态回归》,高歌,
第二期:
《Image2Mesh:传统机器学习->深度学习->图学习探索之路》,周晓云,https://dl.ccf.org.cn/audioVideo/detail.html?id=5010095333525504&_ack=1
《软体机器人的感知及在智能医疗培训上的应用》,赫亮,https://dl.ccf.org.cn/audioVideo/detail.html?id=5010095333820416&_ack=1
《机器人辅助残疾人/老年人穿衣》,张帆,https://dl.ccf.org.cn/audioVideo/detail.html?id=5010095333672960&_ack=1
第三期:
《基于人类示教的装配作业中技能动作的动作规划》,王岩,https://dl.ccf.org.cn/audioVideo/detail.html?id=5010095333672960&_ack=1
《移动机器人位置规划—高效健壮地抓取并搬运多位置的目标物》,许敬仁,
《为机器人开发通用工具解决变种变量的操作任务》,胡正涛,
“机器人智能”论坛后续将每月举办一次,欢迎大家持续关注!





