 返回首页
返回首页
CCF智能机器人专业组|“机器人智能”论坛第九期活动成功举办
“机器人智能”论坛是由中国计算机学会(CCF)和中国人工智能学会(CAAI)联合主办的机器人与人工智能领域的高端学术讲堂。论坛旨在为科研人员、工程师、高校师生以及相关政府决策者提供机器人和人工智能领域的最新成果、学术动态和未来发展的平台,促进跨领域学术交流、学术界与工业界深度合作以及大众创新创业。
2021年1月31日上午10:00,“机器人智能”论坛第九期活动按时开始,并通过在线直播平台分享了精彩报告。
论坛上半场,军事科学院的杨学军院长带来了题为《从计算思维看智能》的精彩报告。

杨院长首先从“可计算、可构造、可存储、可编程、可操作、可链接”等六个角度思考现有计算机对人工智能支持过程中的问题,并分别提出了“是否可以突破图灵机模型”、“是否能够突破冯诺伊曼结构性瓶颈”、“是否能够实现计算与存储的深度融合”、“是否能设计面向行为的语言”、“是否能实现智能的机-机自主协同”、“是否能按照需要和能力实现链接”等六个值得深入思考的问题。

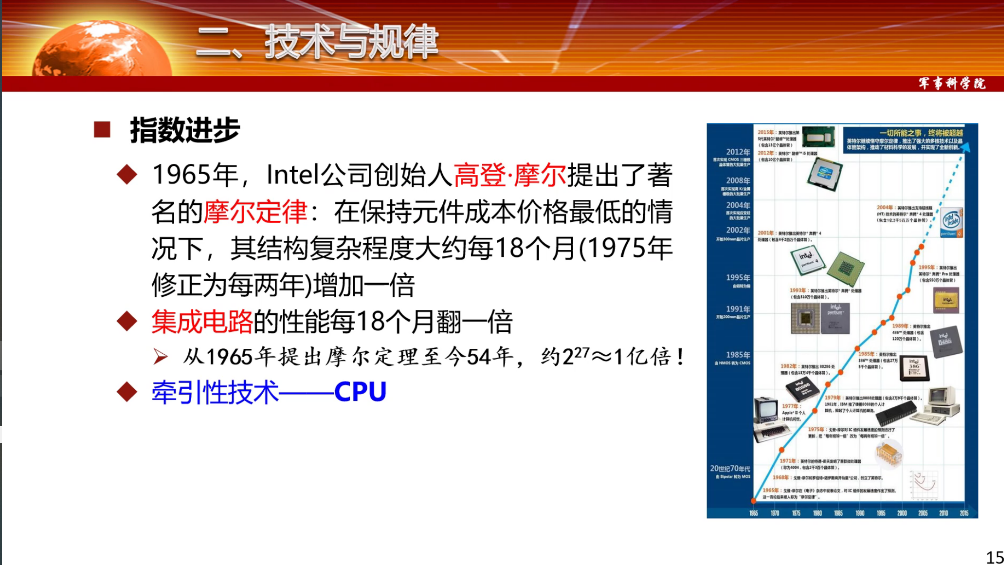
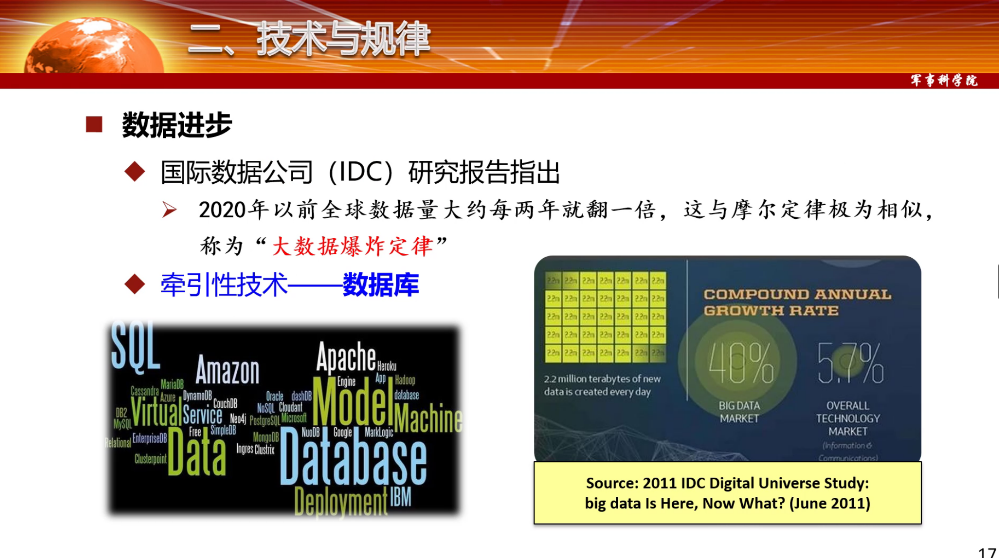
进一步,杨院长从技术发展过程的“指数进步、组合进步、数据进步”三个不同的角度,指出为应对这三个方面的进步所需要的牵引性技术,恰恰就是处理器、操作系统、数据库等三项“卡脖子”技术。

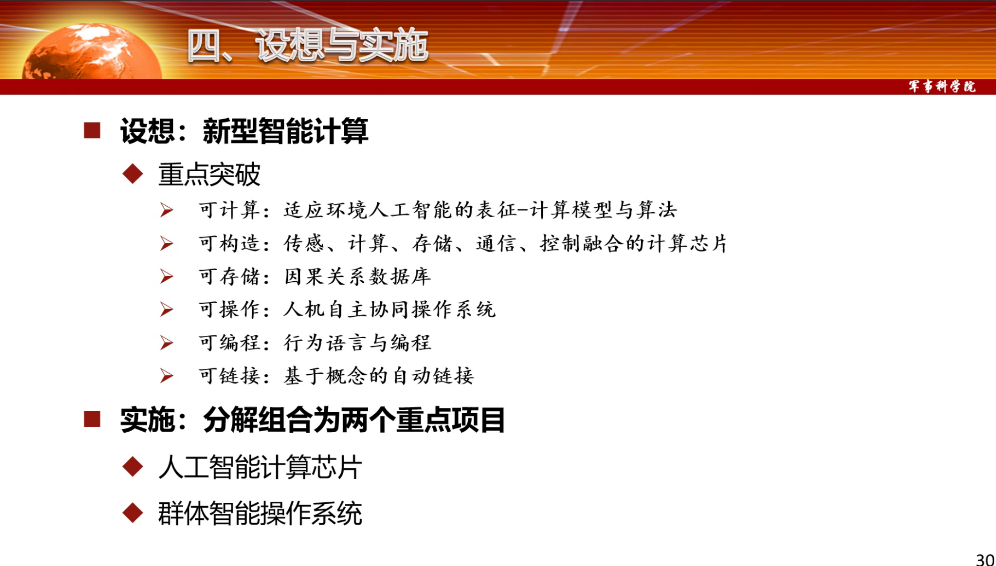
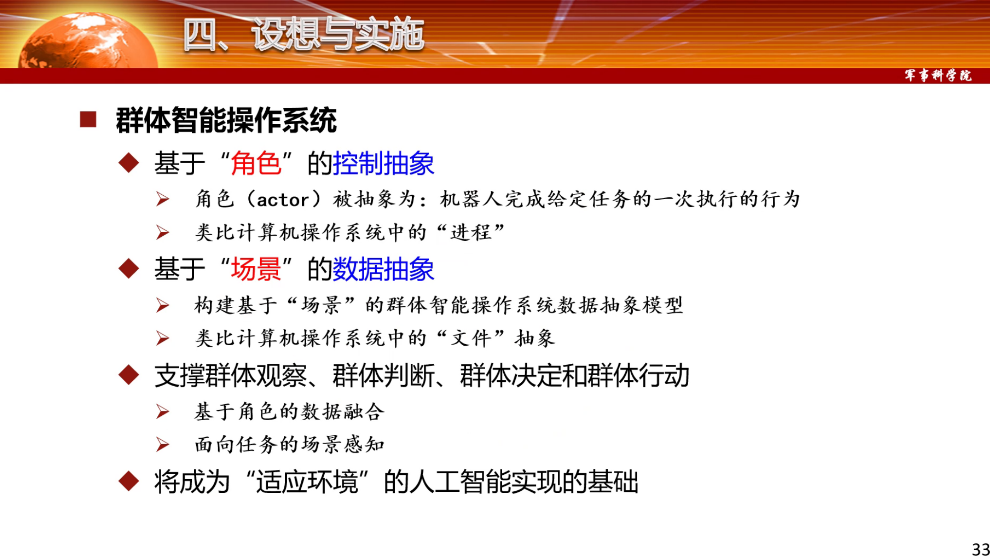
面对这些问题和挑战,杨院长提出了面向新型智能计算的六个重点突破方向,并整合为人工智能计算芯片和群体智能操作系统两个重点项目进行实施。在群体智能操作系统方面,打破传统操作系统的“进程”、“文件”等概念的局限,提出“角色”、“场景”等新的抽象概念。
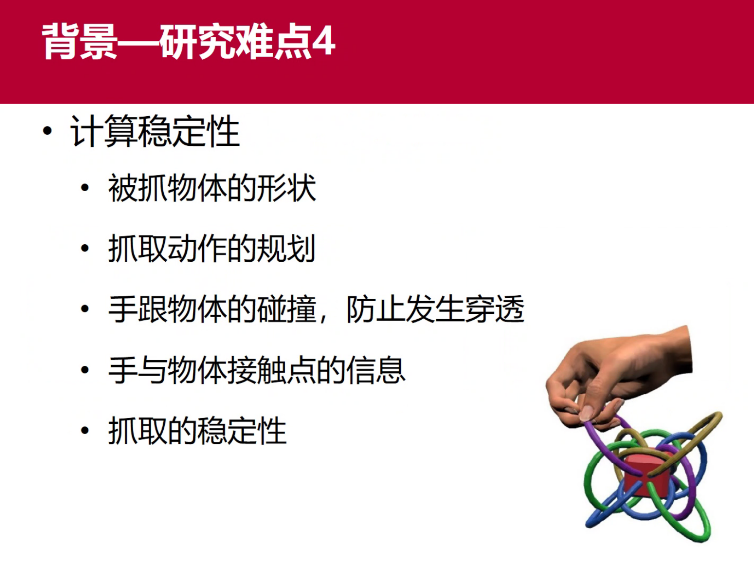
论坛下半场的第一个报告,华东师范大学的张新宇教授带来了题为《基于位姿空间学习的复杂物体的交互抓取》的精彩报告。张教授首先指出复杂物体的交互抓取面临机器手灵巧性、物体复杂度、数据收集不易、计算稳定性等四个方面的问题。
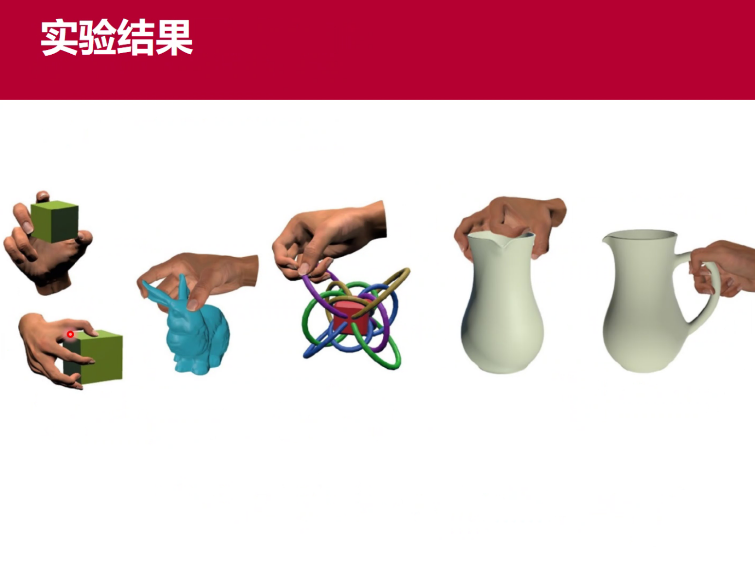
为实现复杂物体的交互抓取,张教授通过引入位姿空间的概念,利用机器学习和粒子群优化计算抓取物体的稳定姿态。实验结果表明可获得复杂物体的合理的抓取方案。张教授还进一步指出,现实生活中人类抓取行为(如,转钢笔)并不总是稳定姿态,如何实现不稳定姿态下的机器手操作是值得深入研究的课题。

论坛下半场的第二个报告,国防科技大学的徐凯教授带来了题为《基于带约束深度强化学习实现在线决策码垛机器人》的精彩报告。
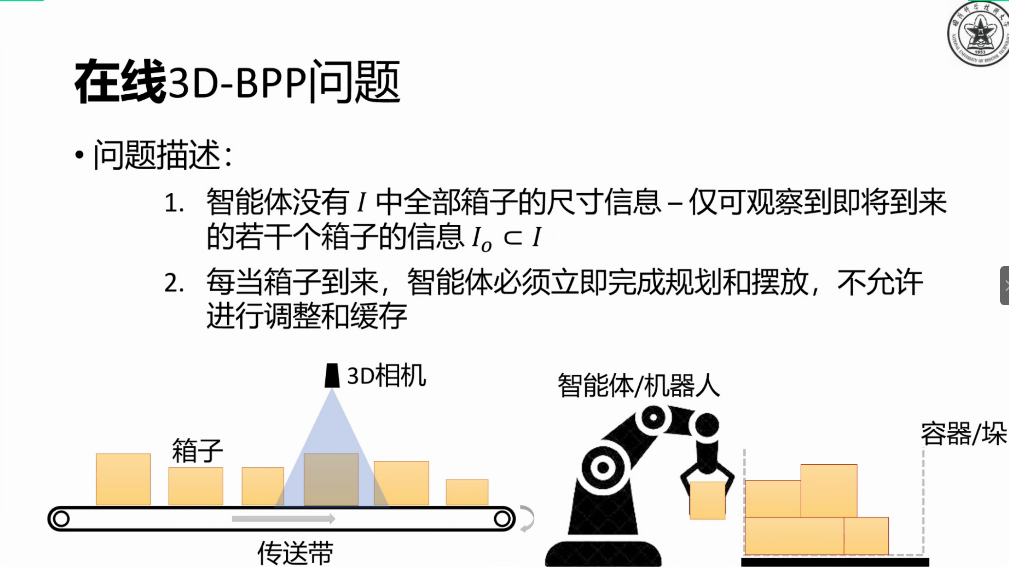
徐教授首先形象地说明了问题:智能机器人面对传送带不断送来的长方体箱子,如何有效放置到有限的容器中?并指出,如果有全局信息、并简化为二维场景,这就是经典的装箱问题(Bin Packing Problem,BPP),这一问题已经是NP完全问题。但同时,这一在线3D-BPP问题在物流等领域又有着大量的应用需求。

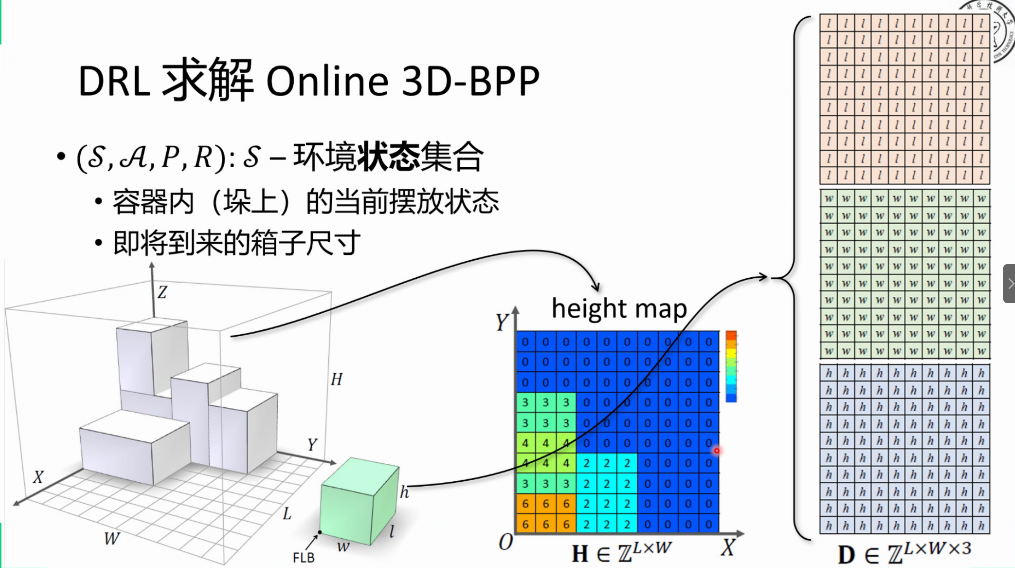
徐教授首先对问题进行离散化建模,并提出一种“预测-投影”的带约束策略学习方法进行求解。并进一步将问题扩展为,如果能够预知后续的k个箱子,应当如何前瞻性地充分利用这些预知信息。

徐教授在模拟环境和真实环境下进行了大量实验,结果表明提出的决策方法的性能远超现有的同类型机器人。

本次论坛报告的回看视频将会通过CCF和CAAI的电子资源向会员免费开放。
“机器人智能”论坛后续将每月举办一次,欢迎大家持续关注!



